バイオハイブリッドロボット
生体の動作機構をロボットと組み合わせることで、自己修復・増殖や化学エネルギーで動くバイオハイブリッドロボットの構築を目指しています。本研究室では、我々の運動を担っている筋肉から筋肉の駆動要素である生体分子モータまで、様々なバイオマテリアルを駆使してバイオハイブリッドロボットの実現を目指しています。
拮抗筋付き骨格筋駆動型バイオハイブリッドロボット
姿勢制御や運動などの身体活動を支えている骨格筋は、体重の約25-35%を占め、人体の各所に存在する臓器である。骨格筋は筋線維の集合体になっており、筋線維が刺激に応じて縮むことによって運動が実現されている。この骨格筋組織を体外で構築するには、人体にて骨格筋の両端部が腱を介して関節に固定されているように、両端部を固定した状態で筋芽細胞を培養する必要がある。本研究室では、剣山上に柱が立っている部材を用いて両端部を固定した状態で培養することで、筋芽細胞が融合され筋線維となり、骨格筋組織の構築を達成した。この体外で構築された骨格筋組織に電気刺激を負荷すると、各筋線維が収縮し、骨格筋組織全体の収縮運動が可能となる。
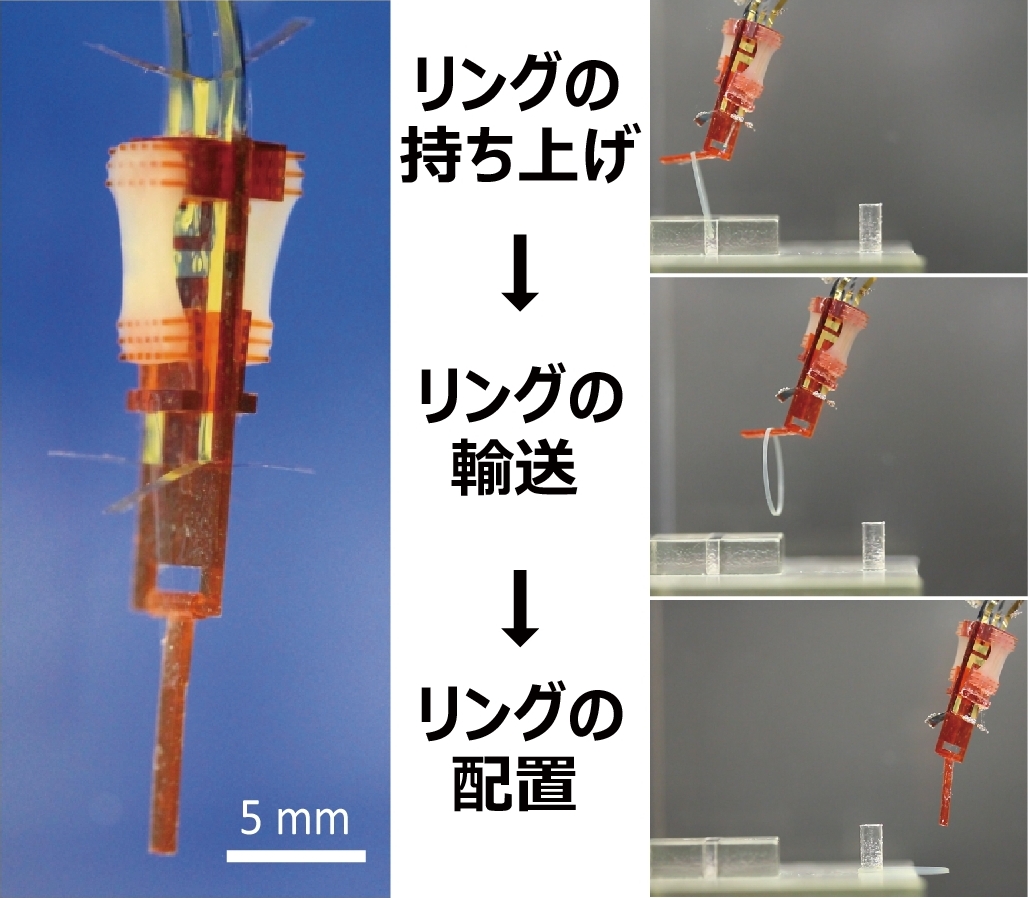
これまでにも単一の骨格筋組織をデバイスに組み込むことで、筋収縮で動くバイオハイブリッドロボットが提案されてきた。しかし、この骨格筋組織は時間経過と共に徐々に自身の張力によって縮まってしまうため、最終的には硬直してしまい、短時間で収縮ができなくなってしまうという問題があった。生体では上腕二頭筋と上腕三頭筋のように骨格筋は拮抗筋構造をとっており、常に一方の骨格筋がもう一方から引っ張られるため、上記のような問題は起こらず、大きな駆動を長期間発揮することができるようになっている。そこで、同等の収縮能を持つ2つの骨格筋組織を向かい合わせるように人工骨格上に配置することで、拮抗筋構造を有するバイオハイブリッドロボットを考案した。上記の方法で構築した拮抗筋構造を有するバイオハイブリッドロボットでは関節を介して骨格筋組織の張力が釣り合っており、単一骨格筋組織を用いたバイオハイブリッドロボットで起こる硬直が発生しないようになっている。加えて、各々の骨格筋組織に対して電気刺激を選択的に負荷し、骨格筋組織を伸縮運動することで、関節を両方向に回転させることで大きく駆動することができる。この時の骨格筋組織の収縮率は約20%、関節の回転角度は約90度であり、人体の骨格筋の収縮率(20-40%)や指の関節角度(85-100度)とほぼ同等の駆動を実現できている。さらに、電気刺激の制御により各々の骨格筋組織の収縮運動を制御することによって、関節の回転によってリングを引っ掛けて持ち上げる、骨格筋組織の収縮させたままにすることでリングを輸送する、もう一方の骨格筋組織を収縮させることによって所定の位置でリングを配置する、といった一連の動作を行うことに成功した。このように拮抗筋構造を設けることで、生体を模した駆動が可能なバイオハイブリッドロボットを実現できることを明らかにした。
Y. Morimoto, et al.: Science Robotics, eaat4440, 2018
空気中で動作可能な骨格筋駆動型バイオハイブリッドロボット
本研究では、中空部分を有したコラーゲン構造中に骨格筋組織が配置された空気中で駆動可能なバイオハイブリッドロボットを実現した。従来から筋組織を用いたバイオハイブリッドロボットでは、培養皿上の歩行やクラゲのような泳ぎが実現されている。しかし、こららのバイオハイブリッドロボットは培養液中でのみ駆動可能であり、空気中で駆動することはできなかった。空気中での駆動が可能になると、ロボットとしての応用先が広がると期待される。
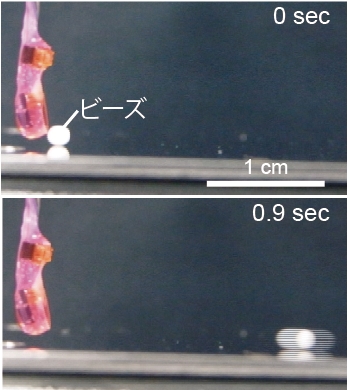
本研究のバイオハイブリッドロボットでは、骨格筋組織の両端は固定部材に接続しており、この固定部材には金電極がしており電気刺激を負荷することができるようになっている。固定部材は柔軟基板上に接着しており、骨格筋組織が収縮すると基板が屈曲するようになっている。この時、コラーゲン構造中に骨格筋組織があるため、空気中であっても骨格筋組織は湿潤環境を維持し電気刺激により収縮することが可能となる。さらに、このバイオハイブリッドロボットの空気中での利用可能性の実証するため、骨格筋組織を電気刺激で収縮させることでビーズを押すことができることを示した。このように、提案の空気中で駆動可能なバイオハイブリッドロボットは、これまでの液中での駆動というバイオハイブリッドロボットの限界を超えることができることを明らかにしている。
Y. Morimoto, et al.: APL Bioengineering, 026101, 2020
神経刺激で駆動する骨格筋組織
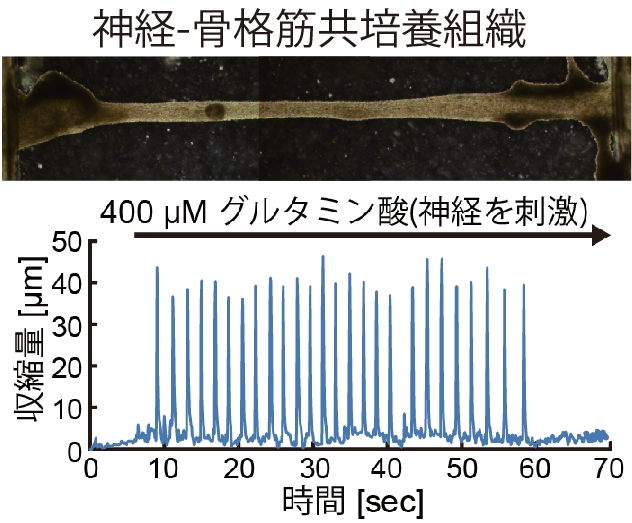
本研究では、培養して形成した骨格筋組織上に神経幹細胞スフェロイドを接着させることで、神経-骨格筋共培養組織を実現した。筋肉の随意運動は、大脳皮質からの信号が筋肉に到達することで発生する。この信号伝達では、運動神経の軸索が筋肉上に接着することで形成した神経筋接合部を介して、神経刺激が筋肉に伝達されている。体外における神経と筋細胞の共培養による神経筋接合部を形成は、薬理研究や組織工学、バイオロボティクスなどの分野で試みられている。しかし、従来の共培養はシャーレ上で行われていたため筋細胞もシャーレに接着しており、生体の筋肉の様に両端部のみが固定された状態で自由に収縮運動することができる構成になっていなかった。
そこで、両端部のみが固定された骨格筋組織上に神経幹細胞スフェロイド(塊)を接着させ、筋組織上で神経幹細胞から運動神経へと分化させることで、運動神経と骨格筋組織の共培養組織を構築することに成功した。この共培養組織では神経筋接合部が形成されており、グルタミン酸(神経伝達物質)を添加した際に運動神経を活性化させることで収縮運動を発生でき、クラーレ(神経筋接合部阻害剤)を添加すると痙攣し収縮運動しなくなる様子が確認された。このことから、本研究の方法で神経-骨格共培養式が構築され、神経からの信号が筋組織に伝達されることで収縮運動可能であることが明らかになった。
Y. Morimoto, et al.: Biomaterials, pp. 9413-9419, 2013
生体分子モーターを用いたバイオハイブリッド輸送システム
私たちは、ATPによって動く生体分子モーターを用いたマイクロ・ナノ輸送システムを実現しました。システムの駆動源は、直線状に移動する分子モーターの一種である微小管とキネシンです。 キネシンは微小管のレール上でATPを加水分解することで移動します。駆動に使う燃料は生体内にあるATPだけなので、外部からの電圧印加やエネルギー供給を必要としません。このため、分子モーターはバイオアクチュエータとして幅広い応用が期待されています。この研究では、バイオマテリアルとMicro Electro Mechanical Systems (MEMS)を結び付ける基礎的な成果を上げることができました。まず輸送のレールとなる微小管を、PDMSを用いて基盤上にパターンしました。そこにキネシンをコーティングしたマイクロビーズ(直径 320 nm)やマイクロ構造物を乗せ、ATPを加えることで微小管に沿って荷物を運ぶことに成功しました。その平均移動速度は、それぞれ476 nm/sと 308 nm/sというものでした。ATP導入によって輸送システムを活性化できることが分かったので、次にhexokinaseを阻害剤として使用し繰り返しon/off制御を行うことにも成功しました。
運動性生体材料を用いたマイクロ駆動デバイスに関する研究
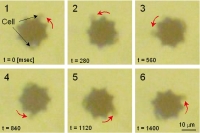
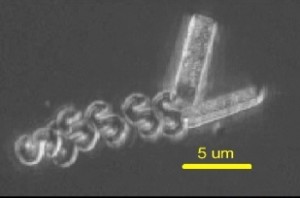
本研究では、クラミドモナス細胞や鞭毛の運動性を利用してマイクロ構造体を駆動することに成功した。また,マイクロサイズの有機EL光源によってクラミドモナス細胞の光誘導が可能なことを明らかにした。 近年、Micro Electro Mechanical Systems (MEMS) 技術を利用して、 細胞や生体分子といった微小かつ微量の試料を扱うマイクロデバイスの研究が盛んに行われている。 このようなマイクロデバイス中では微小物体の搬送やマニピュレーションが重要であるが、従来の電気機械的な方法では生体親和性などに課題があった。そこで、運動性能を持つ生体材料を動力源としたマイクロシステムの研究が近年注目を集めている。運動性生体材料には、自走性の細胞や筋肉を構成する蛋白質であるモーター蛋白質などが知られているが、本研究では培養が容易、外部刺激に強い、走光性などの特長を持つクラミドモナスと呼ばれる緑藻類真核生物をマイクロ構造体の駆動源として利用することを提案した。 ここではアビジン・ビオチン結合を利用してクラミドモナス生細胞とシリコンで作られたマイクロ構造体を結合・駆動する方法を採用した。クラミドモナスのビオチン化の効果、マイクロ構造体のアビジン化の効果を蛍光染色で確かめた後、細胞と構造体を混合した。その結果、1個から数個のクラミドモナス細胞が構造体の側壁などに吸着し、回転運動や直線運動をしているものが観察された。この時、細胞本体部分が構造体に吸着され、鞭毛を自由に動かすことができるときに高い運動性を示すことが分かった。 クラミドモナスのもう一つの特徴に、鞭毛を人為的に本体から切り離すことができる点があり、切り離した鞭毛はアデノシン三リン酸 (ATP) 存在下で回転運動を起こす。鞭毛を、人工的に再構築することができれば、高効率のマイクロアクチュエータとして利用できるが、そのためには、鞭毛と人工構造体のインターフェースが重要である。本研究では、蛋白質の吸着抑止能力を持つ2-メタクリロイルオキシエチルホスホリルコリン (MPC) ポリマーを用いて鞭毛を人工基板に選択的に固定する方法を検討すると同時に、鞭毛による人工構造体の駆動を試みた。本体から単離しATPで再活性化した鞭毛試料を、MPCポリマーがガラス基板上にパターンされたマイクロ流路中に流したところ、数分後にガラス露出部分に固定され、その場で回転している鞭毛が観察された。
H. Nakamura, et al.: microTAS2007, pp. 1222-1224, 2007
モーターたんぱく質バイオアッセイのための高平滑ガラスチャネル

表面が非常に平らなガラスチャネルは生体分子の蛍光を使わない観察に利用できます。私たちはこのデバイスを用いて、ナノスケールビーズと微小管を一つ一つ鮮明に位相差顕微鏡や暗視野顕微鏡で観察することに成功しました。まず、ガラス表面の高平滑を実現するためにフッ化水素の適切な濃度を評価する必要がありました。表面の平滑度は分子間力顕微鏡(AFM)や電子顕微鏡(SEM)によって計測します。その後、パターニングされたPDMSシートをマスクとし、基盤となるガラスをフッ化水素でエッチングしました。それをPDMSコーティングされたカバーガラスでシールしデバイスを作製しました。その流路体積は2-3μlという微少なもので、アッセイに必要となるたんぱく質の量を劇的に減らすことができます。これによって従来のフローセルによる方法に比べより効率的なアッセイが可能となりました。